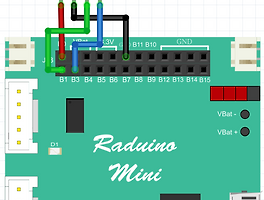
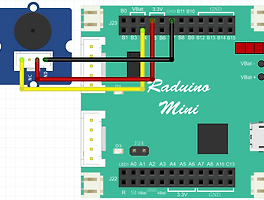
 6. SOUND
SOUND준비물 회로도 코드 1234567891011121314151617181920212223242526272829303132#include "pitches.h" // Buzzer를 사용하기 위한 라이브러리 선언#define SOUND PB4 // Buzzer 신호(S) 핀 설정 int melody[] = { // 멜로디를 배열로 저장함NOTE_E4,NOTE_E4,NOTE_F4,NOTE_G4,NOTE_E4,NOTE_E4,NOTE_F4,NOTE_G4,NOTE_E4,NOTE_F4,NOTE_D4,NOTE_C4,NOTE_D4,NOTE_E4,NOTE_E4,NOTE_B4,NOTE_C5,NOTE_A4,NOTE_F4,NOTE_E4,NOTE_G4,NOTE_F4,NOTE_E4,NOTE_D4,NOTE_D4,NOTE_D4,..
6. SOUND
SOUND준비물 회로도 코드 1234567891011121314151617181920212223242526272829303132#include "pitches.h" // Buzzer를 사용하기 위한 라이브러리 선언#define SOUND PB4 // Buzzer 신호(S) 핀 설정 int melody[] = { // 멜로디를 배열로 저장함NOTE_E4,NOTE_E4,NOTE_F4,NOTE_G4,NOTE_E4,NOTE_E4,NOTE_F4,NOTE_G4,NOTE_E4,NOTE_F4,NOTE_D4,NOTE_C4,NOTE_D4,NOTE_E4,NOTE_E4,NOTE_B4,NOTE_C5,NOTE_A4,NOTE_F4,NOTE_E4,NOTE_G4,NOTE_F4,NOTE_E4,NOTE_D4,NOTE_D4,NOTE_D4,..
 4. 라두이노 미니 조종
라두이노 미니 조종 드론에서 Roll, Pitch, Yaw는 중요한 요소이기 때문에, 이 세가지 조건에 대하여 잘 알지 못한다면 드론을 제대로 띄우기 어렵습니다. 비행체의 경우 Roll, Pitch, Yaw가 매우 유용합니다. 드론의 경우 비행기와 같습니다. 상하타 ( Throttle, 스로틀 ) : 스틱을 앞뒤로 밀어 드론을 위로 띄우거나 아래로 내린다. 전후타 ( Pitch, 피치 ) : 스틱을 앞으로 밀면 전진하고 뒤로 당기면, 뒤로 후진합니다. → 전후 기울어짐의 정도 회전타 ( Yaw, 요우 ) : 스틱을 좌우로 움직이면 제자리에서 반시계 또는 시계방향으로 돕니다. → 수평 회전 정도 좌우타 ( Roll, 롤 ) : 스틱을 좌우로 움직이면 드론이 좌측이나 우측방향으로 기울면서 그 방향으로 나아갑..
4. 라두이노 미니 조종
라두이노 미니 조종 드론에서 Roll, Pitch, Yaw는 중요한 요소이기 때문에, 이 세가지 조건에 대하여 잘 알지 못한다면 드론을 제대로 띄우기 어렵습니다. 비행체의 경우 Roll, Pitch, Yaw가 매우 유용합니다. 드론의 경우 비행기와 같습니다. 상하타 ( Throttle, 스로틀 ) : 스틱을 앞뒤로 밀어 드론을 위로 띄우거나 아래로 내린다. 전후타 ( Pitch, 피치 ) : 스틱을 앞으로 밀면 전진하고 뒤로 당기면, 뒤로 후진합니다. → 전후 기울어짐의 정도 회전타 ( Yaw, 요우 ) : 스틱을 좌우로 움직이면 제자리에서 반시계 또는 시계방향으로 돕니다. → 수평 회전 정도 좌우타 ( Roll, 롤 ) : 스틱을 좌우로 움직이면 드론이 좌측이나 우측방향으로 기울면서 그 방향으로 나아갑..