준비물

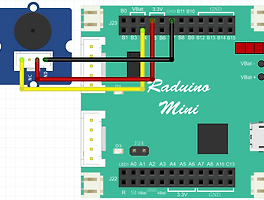
회로도


소스 코드 다운로드
 Raduino_mini_sbus_fc_lib_V2.ino
Raduino_mini_sbus_fc_lib_V2.ino
코드
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 | #include "raduino_sbus.h" #include "raduino_fc.h" #include <Wire.h> // i2C 통신을 위한 라이브러리 SBUS sbus(Serial2); FC Flight(Serial1); boolean startFlag = false; unsigned long currentMillis, previousMillis = 0; int ledPin = PC13; // We'll use timer 1 HardwareTimer timer(1); void setup() { sbus.begin(); sbus.SBUS_OUT= true; //enable SBUS_OUT // Pause the timer while we're configuring it timer.pause(); // Set up period timer.setPeriod(10000); // in 10 microseconds // Set up an interrupt on channel 1 timer.setChannel1Mode(TIMER_OUTPUT_COMPARE); timer.setCompare(TIMER_CH1, 1); // Interrupt 1 count after each update timer.attachCompare1Interrupt(handler_10ms); // Refresh the timer's count, prescale, and overflow timer.refresh(); // Start the timer counting timer.resume(); Flight.begin(); Serial.begin(115200); pinMode(LED_BUILTIN, OUTPUT); digitalWrite(LED_BUILTIN, HIGH); delay(100); // roll positive right // pitch positive forward //Flight.Trim(20,10); //roll: 0.0 , pith: -5.0 Serial.println("Triming..."); delay(5000); // binding..... Flight.Bind(); Serial.println("binding..."); // delay(100); // Flight.Cali(); // Serial.println("Calibration..."); } int ChannelValue[4]; void loop() { int ret = Flight.Event(); if(ret==1)digitalWrite(LED_BUILTIN,LOW); if(ret>0)Serial.println(Flight.retString); if ( startFlag == true ) { ChannelValue[3] += 80; } if( ChannelValue[0] < 30 && ChannelValue[1] < 30 && ChannelValue[2] > 1000 && ChannelValue[3] < 110 ){ // 시동 걸때 currentMillis = millis(); if (currentMillis - previousMillis >= 1500){ previousMillis = currentMillis; startFlag = 1; } } if( ChannelValue[0] > 1000 && ChannelValue[1] < 30 && ChannelValue[2] < 30 && ChannelValue[3] < 110 ){ // 시동 끌때 currentMillis = millis(); if (currentMillis - previousMillis >= 1500){ previousMillis = currentMillis; startFlag = 0; } } Serial.print(ChannelValue[0]); //312 ~1690 우스틱 좌우 roll Serial.print(" | "); Serial.print(ChannelValue[1]); //325 ~1673 좌스틱 좌우 pitch Serial.print(" | "); Serial.print(ChannelValue[2]); //352 ~1698 좌스틱 상하 yaw Serial.print(" | "); Serial.println(ChannelValue[3]); // 330 ~1680 우스틱 상하 Throttle } void handler_10ms(void) { sbus.process(); int ch1 = sbus.getChannel(1); int ch2 = sbus.getChannel(2); int ch3 = sbus.getChannel(3); int ch4 = sbus.getChannel(4); ChannelValue[0]= map(ch1,300,1700,0,1023); //roll ChannelValue[1]= map(ch2,1700,300,0,1023); //pitch ChannelValue[2]= map(ch4,300,1700,0,1023); //yaw ChannelValue[3]= map(ch3,300,1700,0,1023); //throttle if ( startFlag == true ) Flight.Tx(ChannelValue[0],ChannelValue[1],ChannelValue[2],ChannelValue[3]); } | cs |

'교육 자료 > Raduino mini' 카테고리의 다른 글
| 13. 적외선 고도제어 (0) | 2018.10.08 |
|---|---|
| 12. BLE4.0(HM-10) 비행제어 (0) | 2018.10.08 |
| 8. Dot Matrix LED (0) | 2018.10.01 |
| 6. SOUND (0) | 2018.10.01 |
| 5. RGB (0) | 2018.10.01 |